Система мониторинга слепых зон Blis
Активные системы безопасности современных автомобилей на сегодняшний день поражают воображение....

Активные системы безопасности современных автомобилей на сегодняшний день поражают воображение....

Hill start assist – это система, которая выполняет множество полезных...

Аварии автокатастрофы ежегодно уносят миллионы человеческих жизней. Шокирующая цифра напрямую...

Современный автомобиль представляет собой очень сложный комплекс механических и электронных...

Антипробуксовочные системы служат для предотвращения проскальзывания ведущих колёс автомобиля. Ранее антипробуксовочная...

Системы активной безопасности автомобиля служат для предотвращения аварийных ситуаций на...
Производители современных автомобилей оснащают их различными полезными девайсами и механизмами,...

Пути снижения вибраций Снижение виброактикности источника. Обычно возмущающие факторы делят на...
Вынуждающие силы, вызывающие колебания (вибрацию) отдельных частей автомобиля, различаются по...
Воздействие вибраций на детали автомобиля Вибрация приводит к усталостному разрушению деталей....

Автомобильные компании вкладывают миллиарды долларов в развитие технологий, которыми практически...

С каждым днем количество машин на дорогах растет. А вслед...
Немецкие автомобили марки Audi в ближайшее время научатся еще более...

Современный автопарк, состоящий из десятков или даже сотен автомобилей, нуждается...

Практически каждый автовладелец, в особенности проживающий в северных широтах России...

Редкий автолюбитель не тонирует окна своей машины. Тонировка не только...

Посетив магазин автомобильных радиостанций и навигаторов, мы проанализировали отзывы про...

Каждому автовладельцу важно, чтобы его «ласточка» была не просто необходимым...

Всем известно, что для части водителей маневрирование задним ходом на...

Принцип действия системы курсовой устойчивости Спроектированная на основании антиблокировочной системы, защищающей...

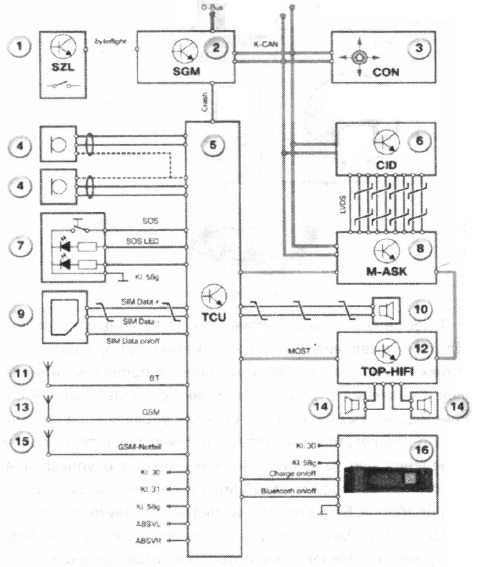
Под телематикой понимают обмен информацией/данными посредством автомобильного телефона (как правило)...
Развитие мобильной связи В 70-е годы прошлого столетия первые автомобильные радиотелефоны...

Общие сведения Система навигации рассчитывает правильный путь к выбранной цели и...
