Конический симметричный неблокируемый дифференциал
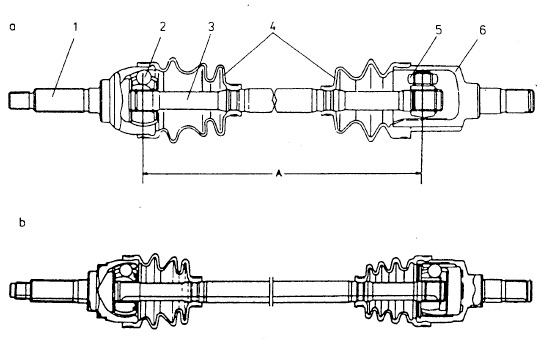
Вал привода ведущих колес разрезан на две части, представляющие собой полуоси б, на внутренних концах которых установлены на шлицах одинаковые конические полуосевые шестерни расположенные внутри корпуса 10 дифференциала. Эти шестерни постоянно соединены друг с другом посредством нескольких (обычно четырех) конических шестерен 9 — сателлитов. Сателлиты могут вращаться на осях крестовины, закрепленной в корпусе 10 дифференциала, который получает вращение от ведомой шестерни 11 главной передачи и установлен в чартере главной передачи на роликовых конических подшипниках. Корпус дифференциала обычно состоит из двух половин, скрепленных болтами. В плоскости разъема корпуса зажата крестовина. Все шестерни дифференциала имеют прямые зубья. Торцевые поверхности сателлитов, как правило, выполнены сферическими, что обеспечивает центрирование сателлитов и их правильное зацепление с полуосевыми шестернями. Для уменьшения трения между корпусом дифференциала и торцевыми поверхностями всех его шестерен устанавливает упорные шайбы, толщина которых подбирается при сборке дифференциала на заводе. Смазка к трущимся поверхностям дифференциала поступает из картера главной передачи через окна в корпусе дифференциала.

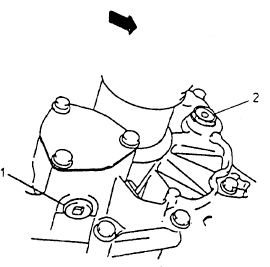
Рис. Схема механизма привода управляемого ведущего моста
Вращающий момент передается от корпуса дифференциала на крестовину и сателлиты. Сателлиты 9 могут рассматриваться как равноплечие рычаги. Они передают вращающий момент на полуосевые шестерни и далее через полуоси на ведущие колеса.
Дифференциалы относятся к планетарным механизмам и имеют две степени свободы, поэтому их свойства определяются соотношением между угловыми скоростями и вращающими моментами отдельных звеньев. У рассматриваемого дифференциала число зубьев обеих полуосевых шестерен одинаково. Поэтому сумма угловых скоростей левой (w1) и правой (w2) полуосевых шестерен равна удвоенной угловой скорости (w0) корпуса дифференциала (w1 + w2 = 2w0), а вращающие моменты обеих полуосевых шестерен (как и моменты ведущих колес) равны при любых соотношениях их угловых скоростей.
При прямолинейном движении по ровной поверхности левое и правое ведущие колеса вращаются с одинаковой угловой скоростью. Усилия на зубьях полуосевых шестерен одинаковы, сателлиты неподвижны на своих осях, и весь дифференциал вращается как единое целое.
При повороте наружное колесо проходит больший путь, чем внутреннее, поэтому его угловая скорость (как и соответствующей полуосевой шестерни) увеличивается по сравнению с угловой скоростью внутреннего колеса. Сателлиты вращаются относительно своих осей и вместе с корпусом дифференциала, а сумма угловых скоростей полуосевых шестерен остается равной удвоенной угловой скорости корпуса дифференциала, т. е. насколько увеличивается угловая скорость одной полуосевой шестерни, настолько же уменьшается угловая скорость другой.
Если одно из колес остановлено, то другое вращается в 2 раза быстрее корпуса дифференциала. Это наблюдается в случае буксования одного из ведущих колес при неподвижном ТС. Если при движении ТС резко остановить корпус дифференциала, например, стояночным трансмиссионным тормозом, то ведущие колеса способны вращаться в разных направлениях, что может вызвать занос ТС и потерю устойчивости. Поэтому запрещается использование стояночного трансмиссионного тормоза для остановки движущегося ТС.
Свойство конического симметричного дифференциала распределять вращающий момент поровну между ведущими колесами является благоприятным при движении ТС по опорной поверхности с высоким коэффициентом сцепления и относительно малым сопротивлением движению, так как оно обеспечивает хорошую управляемость и устойчивость ТС. Однако если одно из ведущих колес находится на скользкой поверхности, например, при трогании ТС с места, вращающий момент на нем будет мал, так как он зависит от коэффициента сцепления, который в этом случае минимален. По свойству симметричного дифференциала такой момент будет и на другом колесе, хотя оно находится на поверхности с высоким коэффициентом сцепления. Если суммарного момента будет недостаточно для движения ТС, оно не тронется с места — одно колесо будет буксовать, а другое будет неподвижным.
Для устранения этого недостатка иногда применяют принудительную блокировку дифференциала, жестко соединяя одну из полуосей с его корпусом. В этом случае момент на каждом ведущем колесе зависит от его сцепления с опорной поверхностью. Момент, подводимый к колесу с лучшим сцеплением, увеличивается, и этим создается увеличенная суммарная сила тяги на обоих ведущих колесах, обеспечивающая трогание ТС с места и его движение в различных условиях.


Добавить комментарий