Полный привод с электромагнитным сцеплением привода колес
В отличие от всех известных схем, компания «Хонда» позволяет распределять крутящий момент не только между задней и передней осями, но и между левым и правым колесами. Система электроники включает в себя датчики угла поворота, бокового и углового ускорения, скорости вращения колес, оборотов двигателя и давления воздуха на впуске, передаточного отношения в трансмиссии. Информация от всех датчиков поступает в компьютер, рассчитывает оптимальное распределение крутящего момента по колесам. Далее компьютер передает информацию блоку управления дифференциалом для распределения момента между осями и задними колесами в соответствии с условиями движения. На нужную ось он перераспределяет от 30 до 70% момента, на одно из задних колес – от 0 до 100%.
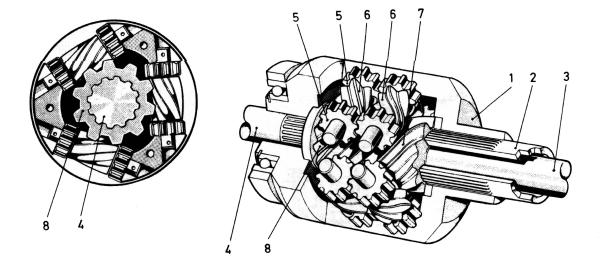
В дифференциале применяются электромагнитные многодисковые сцепления 7. Каждое сцепление индивидуально передает крутящий момент к одному из задних колес, правому или левому. Встроенные электромагнитные соленоиды 5 изменяют положение сердечника магнита относительно его корпуса. Блок управления дифференциалом, в зависимости от условий движения определяет какой ток подать на магнит – тем самым, сжимая пакеты дисков и плавно меняя распределение крутящего момента. Оба сцепления способны работать независимо друг от друга.
Модули сцепления дополнены собственными планетарными передачами 6.
Вместе с дифференциалом работает ускорительный модуль 6, позволяющий сделать более надежным поведение автомобиля в крутых поворотах. Он принудительно «подкручивает» задние колеса в виражах.
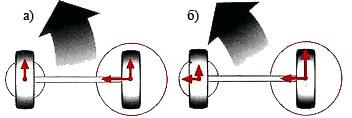
В повороте траектория движения внешнего заднего колеса смещается наружу относительно траектории передних колес. Проблема заключается в том, что при традиционной схеме трансмиссии заднее внешнее колесо вращается медленнее передних и тем самым препятствует полноценной передаче мощности. Как результат — ухудшение управляемости и риск заноса. Эту проблему решает ускорительный блок 6.

Рис. Привод задних колес с электромагнитным сцеплением:
1 – гипоидная передача; 2 – гидравлический привод; 3 – планетарная передача; 4 –сцепление; 5 – соленоид; 6 – планетарная передача; 7 – сцепление; А – ускорительный модуль; Б – блок электромагнитного сцепления
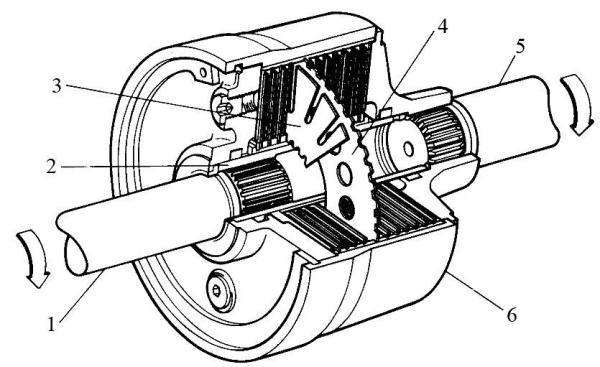
Общий вид реального привода задних колес показан на рисунке.

Рис. Общий вид редуктора привода задних колес
Во время движения по прямой шестерни планетарной передачи вращаются синхронно с карданным валом – скорость передних и задних колес одинакова. При входе автомобиля в поворот гидравлический привод посредством еще одного, уже третьего по счету модуля сцепления 4 включает планетарную передачу 3 в работу, при этом заднее колесо с нужной стороны «подкручивается» до оптимальной скорости.
Блок управления, воспринимая сигнала датчиков, может определять стиль вождения. Если водитель вводит автомобиль в поворот, держа ногу на педали акселератора, реакция электронной системы управления будет отличаться от ситуации, когда автомобиль описывает дугу по инерции или при торможении. При этом крутящий момент на колесах изменяется, что позволяет исключить явные проявления недостаточной или избыточной поворачиваемости автомобиля.
При резком трогании с места у полноприводных автомобилей возникает дефицит крутящего момента на колесах задней оси и избыток – на передней. Чтобы этого не происходило, система оборудована датчиком ускорения, фиксирующим момент, когда необходимо перебросить энергию к задней оси. При спокойном режиме движения больший момент передается на передние колеса, способствуя более стабильному поведению автомобиля.