Система активного распределения крутящего момента (ATTS)
Система активного распределения крутящего момента ATTS (Active Torque Transfer System) служит для улучшения управляемости автомобиля.
При повороте автомобиля на колеса автомобиля действуют две главные силы – тяговая, ускоряющая автомобиль и боковая, которая заставляет автомобиль поворачивать. Обе они связаны с силой трения, возникающей в пятне контакта. Сила трения в свою очередь, ограничена лимитированными сцепными свойствами шины и покрытия.
Рассмотрим распределение сил на колесах при повороте автомобиля.

Рис. Распределение сил на колесах автомобиля при повороте:
а) обычного автомобиля; б – автомобиля с системой активного распределения крутящего момента
При повороте из-за действия центробежной силы внутреннее колесо оказывается разгруженным, то есть оно находится в худших условиях по сцеплению с дорогой. Соответственно, уменьшится и та суммарная сила, сложенная из тяговой и боковой, которую может воспринять колесо, и поэтому оно в меньшей степени будет способно ускорять и поворачивать автомобиль. Система ATTS перераспределяет крутящий момент между ведущими колесами, убирая излишек тяговой силы с внутреннего колеса и перебрасывая его на более нагруженное внешнее. В результате у малонагруженной внутренней шины, освобожденной от излишка тяги, появляется больше возможностей для реализации боковой силы, так необходимой в повороте.
Увеличение крутящего момента на наружном колесе позволяет создать дополнительный момент, который стремится «затащить» автомобиль в поворот.
Задача перераспределения крутящего момента не только между левым и правым колесами, но и задней и передней осями, решена компаниями «Хонда» и «Мицубиси».
Система электронного управления включает в себя датчики угла поворота бокового и углового ускорения, скорости вращения колес, частоты вращения коленчатого вала двигателя и давления воздуха на впуске, передаточного отношения в трансмиссии.

Рис. Схема трансмиссии полноприводного автомобиля Mitsubishi Lancer Evolution VIII:
1 – коробка передач; 2 – двигатель; 3 – муфта блокировки межосевого дифференциала; 4 – блок управления дифференциалами; 5 – датчик угла поворота рулевого колеса; 6 – датчик положения дроссельной заслонки; 7 – колесные датчики АБС; 8 – датчики продольного ускорения; 9 – датчики поперечного ускорения; 10 – задний активный дифференциал; 11 – гидронасос с гидроаккумулятором; 12 – лампа стоп-сигнала; 13 – датчик включения стояночного тормоза; 14 – индикатор переключения режимов: асфальт/гравий/снег; 15 – блок управления АБС; 16 – передний дифференциал; 17 – межосевой дифференциал (50:50)
Информация от всех датчиков поступает в ЭБУ, рассчитывает оптимальное распределение крутящего момента по колесам. Далее ЭБУ передает информацию блоку управления дифференциалом для распределения момента между осями и задними колесами в соответствии с условиями движения. На нужную ось он перераспределяет от 30 до 70% момента, на одно из задних колес – от 0 до 100%. В обычных условиях до 70% крутящего момента передается на передние колеса. При больших ускорениях до 70% крутящего момента поступает на заднюю ось для улучшения динамики разгона и одновременной стабилизации движения. При ускорении в повороте почти 100% крутящего момента может передаваться на заднее внешнее колесо. Диаметрально противоположная картина возникает при снижении скорости на изгибе дороги – крутящий момент будет передаваться на внутреннее колесо.

Рис. Траектория движения автомобиля с электронным приводом управляемых колес:
1 – наибольший крутящий момент; 2 – траектория движения автомобиля с электронным приводом управляемых колес; 3 – автомобиля без электронного привода управляемых колес
Существуют различия в приводе дисков сцеплений приводов колес. Компания «Мицубиси» в своих конструкциях применяет электрогидравлический привод, а компания «Хонда» – электромагнитный.
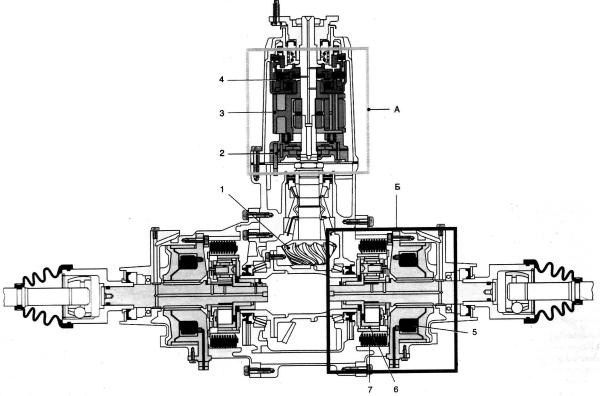
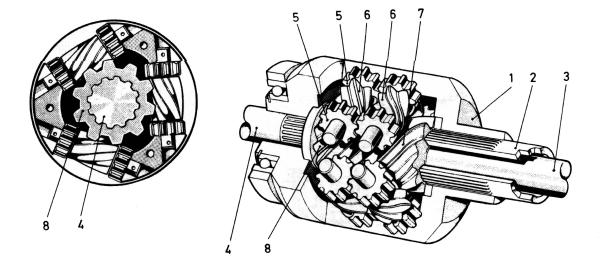
В дифференциале автомобилей «Хонда» применяются электромагнитные многодисковые сцепления 4. Каждое сцепление индивидуально передает крутящий момент к одному из задних колес правому или левому. Встроенные электромагнитные соленоиды 3 изменяют положение сердечника магнита относительно его корпуса. Блок управления дифференциалом, в зависимости от условий движения определяет какой ток подать на магнит – тем самым, сжимая пакеты дисков и плавно меняя распределение крутящего момента. Оба сцепления способны работать независимо друг от друга.
Модули сцепления дополнены собственными планетарными передачами 2.
Вместе с дифференциалом работает ускорительный модуль с гидравлическим приводом (на рисунке не показан), включающий планетарную передачу и передающий крутящий момент на ведущую шестерню гипоидной передачи 1. Этот модуль позволяет сделать более надежным поведение автомобиля в крутых поворотах. Он принудительно «подкручивает» задние колеса в виражах.
В повороте траектория движения внешнего заднего колеса смещается наружу относительно траектории передних колес. Проблема заключается в том, что при традиционной схеме трансмиссии заднее внешнее колесо вращается медленнее передних и тем самым препятствует полноценной передаче мощности. Как результат – ухудшение управляемости и риск заноса. Эту проблему решает ускорительный блок.

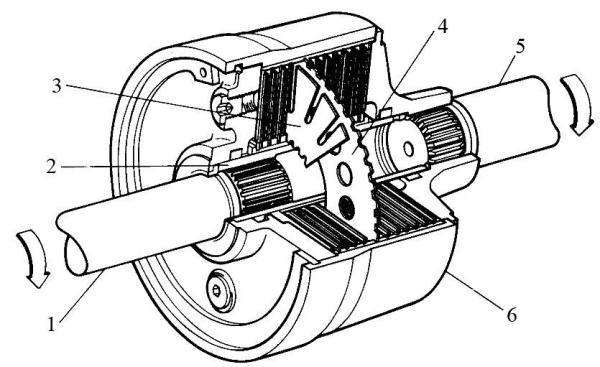
Рис. Привод задних колес с электромагнитным сцеплением:
1 – ведущая шестерня гипоидной передачи; 2 – планетарная передача; 3 – соленоид; 4 – многодисковые сцепления
Во время движения по прямой, шестерни планетарной передачи вращаются синхронно с карданным валом – скорость передних и задних колес одинакова. При входе автомобиля в поворот гидравлический привод посредством еще одного, уже третьего по счету модуля сцепления включает планетарную передачу ускорительного модуля в работу, при этом заднее колесо с нужной стороны «подкручивается» до оптимальной скорости.
Блок управления, воспринимая сигнала датчиков, может определять стиль вождения. Когда автомобиль едет прямо, фрикционы разомкнуты и планетарные шестерни системы вращаются вхолостую, дифференциал поровну распределяя идущий от двигателя крутящий момент между ведущими колесами.
Если водитель вводит автомобиль в поворот, держа ногу на педали акселератора реакция электронной системы управления будет отличаться от ситуации, когда автомобиль описывает дугу по инерции или при торможении. При этом один из фрикционов с помощью исполнительного устройства частично или полностью блокируется, при этом крутящий момент на колесах изменяется, что позволяет перераспределить его до 80% с противоположного колеса.
При резком трогании с места у полноприводных автомобилей возникает дефицит крутящего момента на колесах задней оси и избыток – на передней. Чтобы этого не происходило, система оборудована датчиком ускорения, фиксирующим момент, когда необходимо перебросить энергию к задней оси. При спокойном режиме движения больший момент передается на передние колеса, способствуя более стабильному поведению автомобиля.