Глобальная система навигации (GPS) в автомобиле. Принцип работы
С 1974 г до 1979 г во время испытаний шесть спутников позволяли обеспечить навигацию в Северной Америке в течение только четырех часов в день.
Этот опыт был распространен на весь мир с использованием одиннадцати спутников вплоть до 1982 г, когда было решено, что система будет расширена до двадцати четырех спутников на шести орбитах, то, есть с четырьмя действующими спутниками на каждой. Эти орбиты не являются симметричными и могут изменяться. Спутники летают на высоте около 25 000 км (13 000 миль) и совершают оборот вокруг Земли приблизительно за двенадцать часов. Данная система была разработана американским Министерством обороны.

Использование зашифрованного кода позволяет позиционировать местоположение объекта на поверхности земли в пределах нескольких сантиметров. Сигнал для гражданского использования искусственно загрублен таким образом, чтобы точность позиционирования находилась в пределах 50 м.
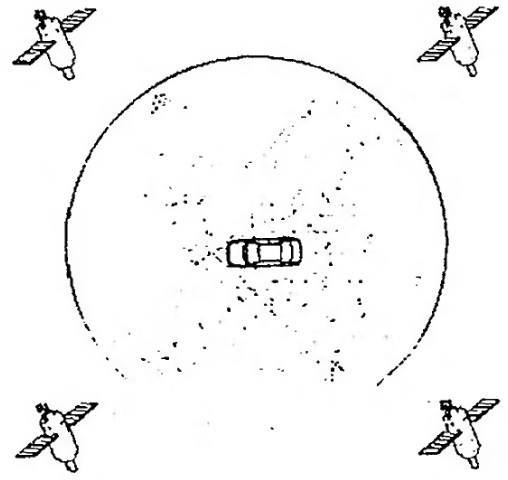
Рис. Спутники, используемые для определения местоположения автомобиля (источник: Ford)
Спутники GPS посылают синхронизированную информацию пятьдесят раз в секунду. Передаются данные положения орбиты, сигналы времени и идентификации. Навигационный компьютер в транспортном средстве получает сигналы от восьми спутников. При вычислениях учитывается время распространения сигнала от каждого спутника. На основе этой информации компьютер может вычислить расстояние до каждого спутника. Текущее местоположение транспортного средства может быть определено при использовании трех координат. Представьте три спутника, образующие треугольник, — положение транспортного средства и пределах этого треугольника может быть определено, если известно расстояние до каждого угла (спутника).
Каждый из спутников имеет четверо очень точных атомных часов, которые синхронизируются с помощью связи между спутниками. Навигационные компьютеры также имеют собственные часы, и, чтобы учесть различие между спутниковым и компьютерным временем, дополнительно измеряется расстояние до наиболее отдаленного спутника.
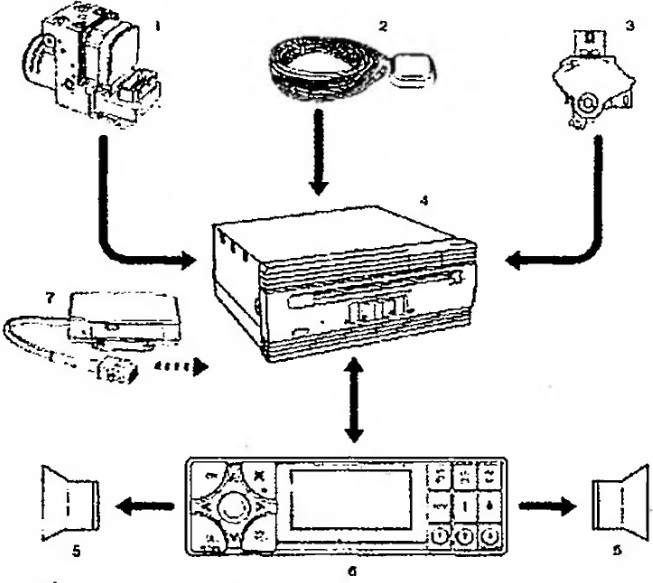
Рис. Радионавигационная система (источник: Ford)
- Модуль системы антиблокировки тормозов (ABS) (информация о пройденном пути, рассчитывается по сигналам датчиков скорости колес)
- Антенна глобальной системы позиционирования (GPS)
- Выключатель заднего хода
- Основной компьютер, включающий привод для компакт-диска
- Громкоговорители
- Блок индикации и управления функциями
- Датчик магнитного поля (не используется, если главный блок содержит датчик угла поворота)
Главные компоненты навигационной системы показаны на рисунке. Карты, а также названия городов и дорог, хранятся в основном блоке автомобиля на CD-ROM. Там же хранится информация об основных маршрутах и меню, звуковые и текстовые. Блок монтируется в багажнике или под пассажирским сидением. В дополнение к GPS операционный блок управляет IСЕ-системой.
Навигационный блок обрабатывает следуюшие сигналы:
- от датчика магнитного поля или от датчика угла поворота (в зависимости от версии);
- от датчиков скорости колеса системы ABS;
- информацию от системы позиционирования GPS;
- данные с CD-ROM;
- информацию от выключателя света заднего хода.
Датчики скорости колеса передают в систему информацию о пройденном расстоянии. При этом используются датчики на пассивных колесах, потому что ведомые колеса проскальзывают при ускорении. В некоторых версиях угол поворота вычисляется при сравнении сигналов с левой и правой стороны. Это не требуется, когда используется датчик угла поворота.
Выключатель заднего хода используется потому, что сигналы от датчиков скорости колеса не указывают, едет ли транспортное средство вперед или назад. Антенна GPS получает спутниковые сигналы и усиливает их. Она монтируется под капотом перед ветровым стеклом или в другом подобном месте.
Датчик магнитного поля (если используется) обычно располагается сверху заднего окна в герметичном корпусе. Компас определяет направления движения относительно магнитного поля Земли. Он также обнаруживает изменения направления при повороте за угол или на изгибе дороги.
Две пересекающиеся под прямым углом измерительные катушки отслеживают изменения в магнитном поле Земли, потому что оно по-разному влияет на каждую из них. Направление поля Земли может быть вычислено по полярности и величине напряжения, создаваемого этими двумя катушками. Меньшая катушка возбуждения производит сигнал, который заставляет колебаться ферритовый сердечник. Сигналы от измерительных катушек меняются в зависимости от направления движения транспортного средства в магнитном поле Земли. Одна из проблем датчика этого типа состоит в том, что он также подвержен действию других магнитных полей, например, создаваемых нагревателем заднего стекли. Поэтому должна быть сделана поправка на нюансы конфигурации магнитных полей автомобиля.
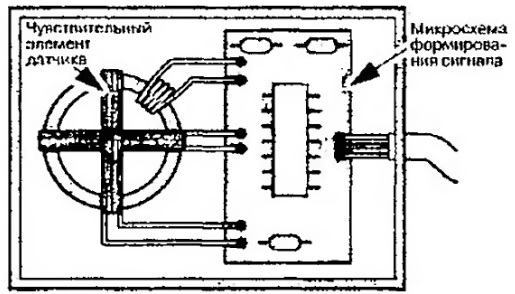
Рис. Датчик магнитного поля (компас) (источник: Ford)
Пьезоэлектрические элементы 1 измеряют значение ускорения вращательного движения автомобиля, то есть повороты, а элементы 2 регистрируют поперечные ускорения автомобиля (А — вертикальная ось транспортного средства).
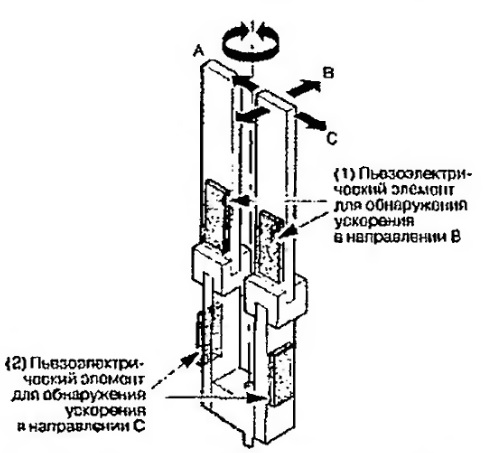
Рис. Датчик угла поворота (источник: Ford)
Сигнал датчика угла поворота в соединении с сигналами других датчиков позволяет навигационному компьютеру отслеживать движение автомобиля на карте. Датчик устанавливается в основном блоке и заменяет магнитный компас. Датчик походит на крошечную вилку камертона, которую заставляют вибрировать с частотой около килогерца с помощью двух нижних пьезоэлектрических элементов. Верхние элементы измеряют ускорение, когда транспортное средство изменяет направление движения, потому что вращение пьезоэлементов вызывает появление на их гранях электрического заряда. Этот сигнал преобразуется в напряжение и пересылается на главный компьютер. Преимущество этого типа датчика состоит в том, что он не чувствителен к магнитным аффектам.
Принципы действия и возможности системы слежения за движением автомобиля разные у разных изготовителей. Конструкции таких систем постоянно совершенствуются. На рисунке показан типичный внешний вид системы, используемой компанией Ford. Возможности новых моделей постоянно расширяются, но они сохраняют сходство между собой.
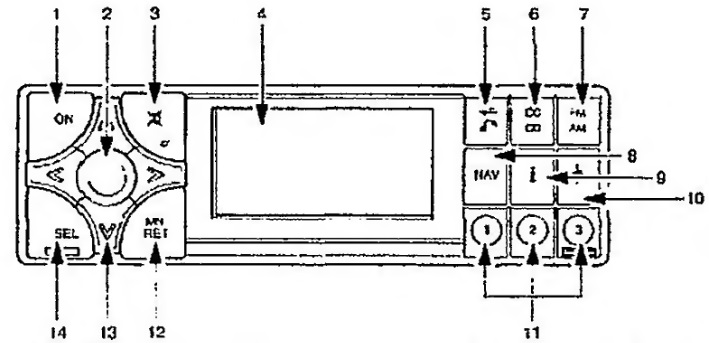
Рис. Типичный дисплей операционного блока (источник: Ford): 1. Выключатель прибора; 2. Регулятор громкости, низких и высоких частот баланса колонок {выбор кнопкой SEL); 3. Кнопка отключения звука; 4. Зона дисплея; 5. Управление магнитофоном; 7. Выбор диапазона приемника FM/АМ; 8. Выключатель навигационной системы; 9. Выключатель ввода информации; 10. Функция сканирования; 11. Кнопка предварительной установки станций; 12. Вывод и отмена меню; 13. Управление курсором дисплея; 14. Выбор аудио функции
Обычно в системах предусмотрен вывод текста и речи на одном из множества языков. Когда в качестве языка выбран английский, доступен также выбор между метрическими и государственными единицами измерений.
Когда выбрана функция навигации (NAV), появляется меню, на котором представлены варианты индикации, например:
- ввод адреса;
- адресная книжка (для задания пунктов назначения):
- пункты по пути следования, представляющие интерес для водителя;
- последний пункт назначения;
- установки системы (в том числе режим диагностики на некоторых системах).
Вначале в систему вводится адрес пункта назначения при помощи кнопок управления курсором. Система «предсказывает» возможное назначение по мере ввода букв, таким образом, совсем не обязательно вводить полный адрес. Как только пункт назначения установлен, центральный блок вычислит маршрут. Можно задать вариант выбора самого короткого или самого быстрого маршрута на каждом этапе. Инструкции сопровождения маршрута появляются на дисплее и передаются голосом через динамики.
Даже при том, что спутниковая информация обеспечивает точность позиционирования только 50 м. используя точный расчет траектории, интеллектуальная система программного обеспечения все же может привести водителя к пункту назначения с точностью до 5 м. Точный расчет траектории означает что положение транспортного средства определяется также по сигналам датчика скорости и датчика угла поворота. Компьютер может обновить координаты положения транспортного средства, определенного по данным GPS, используя возможные положения автомобиля на сохраняемой в памяти цифровой карте. Например, когда транспортное средство приближается к перекрестку и затем делает правый поворот, комбинация данных GPS и расчета траектории позволяет определить его местоположение более точно, потому что во многих местах на карте возможно только одно определенное положение — короткие дорожки через поля не принимаются в расчет! Точный расчет траектории позволяет осуществлять навигацию даже тогда, когда спутниковые сигналы отсутствуют, однако в этом случае в систему должно быть введено стартовое положение автомобиля.
Глобальные системы позиционирования используют комбинацию информации от спутников и датчиков, чтобы точно определить положение транспортного средства на цифровой карте. Тогда может быть вычислен маршрут к заданному месту назначения. Системы GPS продолжают развиваться, и через некоторое время их программное обеспечение станет еще более совершенным. Уже сейчас, например, возможно «спросить» систему о ближайшей заправочной станции или ресторане. К тому же телематические системы все больше находят «общий язык» с автомобильными системами развлечений.