Электронный блок управления двигателя (ECU)
Поскольку сложность систем автомобиля в последнее время значительно возросла, также увеличился объем информации, сохраняемой в памяти ECU. Ранние версии программируемой системы зажигания, созданной компанией Rover, достигали точности в выборе времени зажигания ±1,8″, тогда как обычный распределитель обеспечивает точность ±8″. Информация, полученная в ходе стендовых, а также ходовых испытаний транспортного средства, сохраняется в постоянной памяти ROM. Основная карта выбора момента зажигания состоит из установок правильного опережения зажигания для 16 значений скорости и 16 значений условий нагрузки. Это показано на рисунке в виде трехмерной модели.

Рис. Трехмерная карта выбора момента зажигания, хранящаяся в ECU
Чтобы иметь набор установок для восьми скоростей и восьми температурных участков, используется отдельная трехмерная модель. Она применяется для ввода поправок к основным установкам на температуру охлаждающей жидкости двигателя. Это улучшает ходовые качества автомобиля и может применяться для ускорения прогрева двигателя. Данные также подвергаются дополнительной корректировке по нагрузке при температурах ниже 70 «С. На рисунке показана логическая блок-схема выбора оптимальной установки угла зажигания. Отметим, что для обеспечения постоянной энергии искры ECU также вводит коррекцию и по углу активации как функции частоты вращения двигателя, и по изменению напряжения батареи. Сниженное напряжение батареи требует увеличенного времени активации, повышенное напряжение — уменьшенного времени.
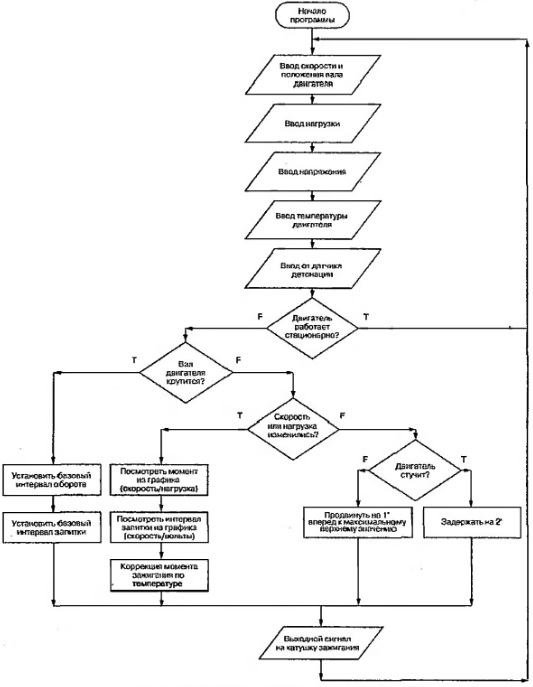
Рис. Блок-схема вычисления угла опережения зажигания
Типичная для большинства «компьютерных» систем блок-схема, показанная на рисунке, описывает блок управления программным зажиганием. Входные сигналы обрабатываются, и полученные данные сохраняются в оперативной памяти RAM.

Рис. Типичная для большинства «компьютерных» систем блок-схема управления для программного зажигания
Программа и значения установочных данных заранее занесены в ROM. В этих системах для выполнения команд, требуемых в соответствии с программой, используется микроконтроллер. Информация, поступающая от датчиков, преобразуется в цифровую форму в схеме АЦП. Компания Rover, как и многие другие изготовители, использует бортовой датчик давления, состоящий из анероидной камеры и тензодатчиков, измеряющих нагрузку на двигатель.
Блок-схема, используемая для представления программы, занесенной в ROM блока управления двигателем, показана на рисунке.




