Бесступенчатые механизмы поворота гусеничной машины
Все бесступенчатые МП позволяют изменять передаточное отношение МП непрерывно (бесступенчато). Как правило, это обеспечивается применением различных фрикционных вариаторов или гидропередач. Обычно используют гидрообъемные регулируемые передачи. Последние наиболее широко распространены в качестве механизмов поворота гусеничных машин различного назначения.
Все механизмы поворота, в том числе бесступенчатые, подразделяются на несколько типов. На рисунке а показана принципиальная кинематическая схема трансмиссии гусеничной машины с бесступенчатым механизмом поворота первого типа, а на рисунке б — с механизмом второго типа. Механизмы поворота первого типа сохраняют в процессе поворота машины скорость vc ее центра масс постоянной, равной скорости прямолинейного движения, поскольку, обеспечивая увеличение скорости v2 забегающей гусеницы на величину дельта_v, на такую же величину уменьшают скорость v1 отстающей в процессе поворота гусеницы. Механизмы поворота второго типа обеспечивают (за счет уменьшения скорости отстающей гусеницы) сохранение в процессе его выполнения постоянной скорости v2, равной скорости прямолинейного движения машины.

Рис. Схемы бесступенчатых механизмов поворота гусеничных машин:
а, б — механизмы первого и второго типов соответственно
Бесступенчатый МП (см. рис. а) включает в себя гидравлическую передачу, состоящую из регулируемого насоса Н и нерегулируемого гидродвигателя М, т.е. является гидрообъемным механизмом поворота (ГОМП). Насос, приводимый во вращение от ведущего вала КП, связан гидролиниями с гидродвигателя. Вал последнего через коническую зубчатую передачу соединен с промежуточным валом, который, в свою очередь, посредством зубчатых передач связан с бортовыми суммирующими планетарными передачами (СПП). Эти планетарные передачи называют суммирующими, поскольку они предназначены для суммирования двух потоков мощности, поступающих от двигателя при повороте машины: через КП и гидропередачу. Поток мощности, проходящий через КП, поступает на эпициклические шестерни СПП, связанные с ведомым (выходным) валом КП. Поток, проходящий через гидропередачу, поступает на промежуточный вал и далее на солнечные шестерни СПП. Потоки мощности суммируются на водилах СПП, связанных с ведущими колесами гусениц.
При прямолинейном движении гусеничной машины с бесступенчатым механизмом поворота первого типа мощность к ведущим колесам подводится одним потоком — только через КП. Гидропередача не работает, а вал гидродвигателя гидравлически заторможен, поэтому промежуточный вал остается неподвижным. Неподвижны при этом и солнечные шестерни СПП.
Гидрообъемные механизмы поворота первого типа используются на гусеничных машинах ГМ-569 и -352; ГОМП гусеничного шасси ГМ-352, например, состоит из гидропривода аксиально-поршневого насоса с переменной подачей, гидродвигателя постоянной производительности, механизма управления, питающей установки с лопастным насосом (служит для подпитки гидропривода, механизмов управления), клапанной коробки, фильтра и других элементов. Все узлы смонтированы на корпусе гидропривода в едином агрегате, который устанавливается на картер гидромеханической передачи машины.
Органом управления поворотом является рулевой штурвал, напоминающий автомобильное рулевое колесо. Штурвал связан с устройством для изменения подачи насоса. Поворачивая штурвал на определенный угол, водитель меняет количество жидкости, поступающей от насоса к гидромотору в единицу времени. При увеличении подачи насоса возрастает частота вращения вала гидромотора и, следовательно, солнечных шестерен СПП. При повороте машины солнечные шестерни вращаются с одинаковой частотой, но в разные стороны по отношению к эпициклическим шестерням СПП. Направления вращения солнечной и эпициклической шестерен СПП забегающего борта машины совпадают. Направления вращения аналогичных шестерен СПП отстающего борта не совпадают, поэтому водило забегающего борта будет вращаться с большей угловой скоростью, чем водило отстающего борта. В результате скорость забегающей гусеницы окажется больше, чем скорость отстающей (изменение скоростей по сравнению со скоростью центра масс машины осуществляется на одну величину Ас). Регулирование подачи насоса, а следовательно, и радиуса поворота машины производится бесступенчато.
Управление ГОМП осуществляется с места механика-водителя. Привод управления включает в себя рулевую колонку 5, которая может откидываться на определенный угол для облегчения посадки водителя, штурвал 35, систему тяг и рычагов для связи штурвала с органом управления изменением подачи насоса гидропривода 21. Для ограничения угла поворота рулевой колонки имеются упоры 1. При повороте рулевого штурвала с помощью системы тяг перемещается шток 18 нуль-установителя 31 пружинного типа. Вместе со штоком в ту или иную сторону перемещаются втулки 15 и 19 в зависимости от направления поворота штурвала. При этом сжимается пружина 17, создавая запас энергии, необходимой для возврата привода управления ГОМП в исходное (нейтральное) положение. Тяга 30 нуль-установителя кинематически связана с валиком 24 механизма управления гидроприводом ГОМП.
Для поворота машины вправо штурвал поворачивают также вправо, и наоборот. Радиус поворота машины зависит от угла поворота штурвала (максимальный угол поворота ±40°): чем больше угол поворота штурвала, тем меньше радиус поворота машины.
Бесступенчатый механизм поворота второго типа, представленный на рисунке б, конструктивно несколько сложнее. Он также имеет две СПП и регулируемую гидропередачу. Однако гидропередача состоит из двух регулируемых насосов-моторов (Н-М1 и Н-М2). Каждый насос-мотор представляет собой гидромашину, которая может работать в режиме насоса либо гидродвигателя. Насос предназначен для преобразования механической энергии в энергию рабочей жидкости, а гидродвигатель — для преобразования энергии жидкости в механическую энергию.
Для обеспечения прямолинейного движения или поворота гусеничной машины с данным механизмом поворота служат фрикционы — Ф4 и тормоза T1 и Т2.
При прямолинейном движении гидропередача не работает. В этом случае возможны два режима. При первом, когда мощность от двигателя передается к ведущим колесам гусениц одним потоком, все фрикционы выключены, а тормоза Т1 и Т2 щрцочены. Таким образом, солнечные шестерни СПП будут заторможены, а поток мощности от двигателя пройдет через КП, эпициклические шестерни, водила СПП и далее к ведущим колесам, что обеспечит движение машины на передачах нормального ряда.

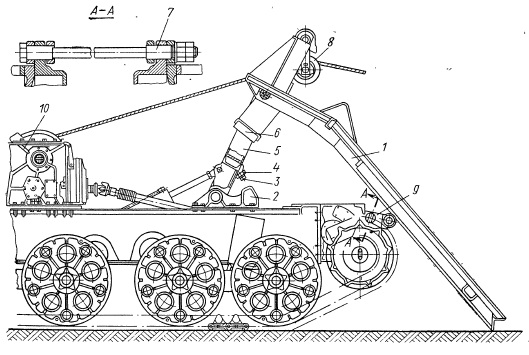
Рис. Привод управления гидрообъемным механизмом поворота:
1 — упор; 2 — рукоятка стопора; 3 — рулевая колонка; 4 — втулка картера; 5 — зубчатая рейка; 6, 7, 14 — гайки; 8 — палец; 9 — в.илка; 10 — чехол; 11, 12 — вкладыши; 13 — уплотнительное кольцо; 15, 19 — втулки; 16 — корпус; 17 — пружина; шток; 20— вертикальный валик; 21 — гидропривод; 22 — упорные винты; 23, 27, 29, 33 — рычаги; 24 — валик; 25 — регулировочная тяга; 26, 28, 30, 32, 34 — тяги; 31 — нуль-установитель; 35 — штурвал; О, I, II — положения штурвала 1
Возможно также прямолинейное движение машины на передачах замедленного ряда (второй режим), т. е. с пониженной скоростью движения и, следовательно, с большим вращающим моментом, подводимым к ведущим колесам гусениц. При этом обеспечиваются большие тяговые усилия на гусеницах, что необходимо для движения в тяжелых дорожных условиях (по рыхлому снегу, заболоченной местности и т.д.). В данном случае водитель включает фрикционы Фх и Ф2, выключая тормоза Т1 и Т2. Фрикционы поворота Ф3 и Ф4 остаются выключенными. Тогда мощность от двигателя к ведущим колесам гусениц поступает двумя потоками: через ведомый вал КП на эпициклические шестерни СПП и одновременно от промежуточного вала КП через сблокированные фрикционы Фх и Ф2, зубчатые передачи и далее к солнечным шестерням СПП, направление вращения которых противоположно направлению вращения эпициклических шестерен, что уменьшает окружную скорость водил СПП. Поэтому и гусеницы при движении машины на замедленной передаче будут перематываться с меньшей скоростью, чем при движении на передаче нормального ряда.
При повороте машины включают фрикционы поворота Ф3 и Ф4 и в зависимости от его направления — фрикццрн Фх или Ф2. Тормоза Tjи Т2 выключены. Предположим, что для осуществления поворота включают фрикцион Ф1. Тогда один поток мощности поступает от двигателя на эпициклические щестерни СПП обоих бортов машины, а другой — от промежуточного вала через сблокированный фрикцион Ф3 к солнечной шестерне СПП забегающего борта (посредством зубчатой передачи) и гидромашине H-M1. Гидромашина H-M1 работает в режиме насоса, а гидромашина Н-М2 — в режиме гидродвигателя. Водитель, уменьшая подачу рабочей жидкости поворотом рулевого штурвала, снижает частоту вращения гидродвигателя М2, связанного посредством фрикциона Ф4 и зубчатой передачи с солнечной шестерней СПП отстающего борта. Поэтому скорость забегающей гусеницы при повороте не изменяется, а отстающей плавно уменьшается вплоть до нуля. Таким образом регулируют радиус поворота машины в зависимости от требуемой траектории криволинейного движения. При остановке вала гидродвигателя М2 автоматически включается тормоз Т2, воздействующий на солнечную шестерню СПП отстающего борта.
Аналогично осуществляют поворот машины и в другую сторону, включая фрикцион Ф2 и заставляя работать гидромашину Н-М2 в режиме насоса. При этом потоки мощности от двигателя к СПП изменятся.
Интересным решением по управлению поворотом сочлененных гусеничных машин является конструкция механизма поворота двухзвенных транспортеров. В состав двухзвенных сочлененных гусеничных транспортеров входят два корпусных шарнирно связанных звена, которые могут взаимно складываться в трех плоскостях: горизонтальной, продольной вертикальной и поперечной вертикальной. Звенья соединены друг с другом с помощью специального поворотно-сцецного устройства, а изменение их положения обеспечивается с помощью гидроцилиндров с золотниковым управлением. Для осуществления поворота машин используется рулевое управление (привод золотников).

Рис. Рулевое управление двухзвенного транспортера:
1 — рулевая колонка; 2, 10, 15 — рычаги; 3 — регулировочная втулка; 4 — гайка; 5, 6 — тяги; 7 — качающийся рычаг; 8 — золотник вертикального складывания; 9 — золотник гидравлического привода управления поворотом; 17, 12 — валики; 13 — текстолитовая втулка; 14 — палец
Рулевое управление двухзвенного транспортера обеспечивает поворот его звеньев в горизонтальной плоскости и их складывание в вертикальной плоскости.
В кабине механика-водителя установлена рулевая колонка 7, которая через систему тяг и рычагов связана с золотником 9 гидравлического привода управления поворотом. Рычаг 2, установленный справа от сиденья водителя, связан через валик 11, рычаг 15, систему тяг 5 и качающиеся рычаги 7 с золотником 8 вертикального складывания. Тяги и рычаги соединены пальцами 14. С помощью золотников 8 и 9 производится управление соответствующими гидроцилиндрами транспортера.
Рулевая колонка и рычаг 2 крепятся на полике кабины, а тяги проходят по правому борту рамы первого звена транспортера. Все качающиеся рычаги установлены на текстолитовых втулках 13. Максимальный угол поворота рулевого колеса (автомобильного типа) составляет ±35°. Поворот рулевого колеса вправо обеспечивает поворот машины также вправо, и наоборот.
При перемещении рычага 2 вперед транспортер складывается в вертикальной плоскости, наклоняя первое звено вперед. При перемещении этого рычага назад складывание осуществляется в обратную сторону.
Длина тяг регулируется с помощью регулировочных втулок 3, которые фиксируют с помощью корончатых гаек 4.