Сцепление автомобиля. СР1 (Controlled Piston). Драйв-Матик. Порошковое сцепление. MRF
Механические коробки передач пока еще не потеряли своей актуальности. Однако управление такой коробкой требует как достаточного опыта, так и определенных усилий. Поэтому ряд фирм предлагают различные способы автоматизации управления сцеплением для стандартных коробок передач.
СР1 (Controlled Piston)
Фирма FTE Automotive разработала универсальный электрогидравлический актюатор (исполнительный механизм) сцепления СР1 (Controlled Piston) – управляемый поршень.
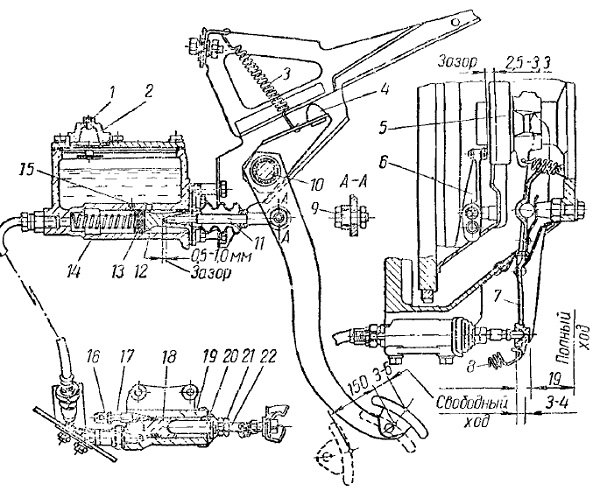
Исполнительный механизм содержит главный цилиндр 9, поршень с винтовым штоком 4 и бесщеточный электродвигатель 6 постоянного тока. Механизм управляется электронным блоком управления 13, в который поступает информация от датчиков о положении педали сцепления 2, положении поршня 11, давлении в рабочем цилиндре 12. Блок управления обрабатывает полученные сигналы, включает электродвигатель и изменяет силу тока в нем. Ротор электродвигателя в виде гайки, вращаясь, передвигает шток с резьбой. Шток толкает поршень главного цилиндра и под действием давления жидкости срабатывает рабочий цилиндр, поршень которого выключает сцепление. Усилие на педали при этом минимально. Чтобы уменьшить трение, гайка заполнена внутри шариками, обкатывающими «резьбу» на штоке.

Рис. Универсальный электрогидравлический исполнительный механизм выключения сцепления:
а – управление по сигналу датчика педали; б – управление по датчику давления;
1 – педаль сцепления; 2 – датчик педали сцепления; 3 – пружина; 4 – поршень с винтовым штоком; 5 – ротор электродвигателя; 6 – электродвигатель; 7 – питательный бачок; 8 – дополнительный главный цилиндр; 9 – главный цилиндр; 10 – рабочий цилиндр; 11 – датчик положения поршня; 12 – датчик давления; 13 – электронный блок управления
Более совершенной является конструкция исполнительного механизма повышенной надежности, позволяющего выключать сцепление при отказе основной системы. В таком механизме с педалью выключения сцепления соединен дополнительный гидравлический цилиндр, жидкость из которого поступает за поршень главного цилиндра. Датчик давления определяет давление жидкости за поршнем главного цилиндра, а датчик положения поршня положение поршня в данный конкретный момент. В зависимости от полученных сигналов блок управления, изменяется сила тока в роторе, поворачивая его. При этом поршень главного цилиндра передвигается на необходимую величину.
Предлагаемый узел СР1 универсален и его можно использовать для автоматического управления роботизированной коробкой передач без педали выключения сцепления.
Драйв-Матик
Другой системой автоматического выключения сцепления является система, реагирующая на положение педали подачи топлива, является система фирмы «Драйв-Матик», выпускаемая в Германии в качестве оборудования автомобилей, предназначенных для инвалидов.
Исполнительное устройство этой системы представляет собой вакуумную сервокамеру 1, между корпусом которой и диафрагмой 3 располагается полость 2 разряжения регулирующая режимы включения и выключения сцепления.

Рис. Система автоматического управления сцеплением «Драйв-Матик»:
1 – вакуумная сервокамера; 2 – полость разрежения; 3 – диафрагма; 4 – шток вакуумной камеры; 5 – рычаг; 6 – тяга; 7 – педаль сцепления; 8 – педаль подачи топлива; 9 – трос; 10 – рукоятка переключения передач; 11 – рычаг рукоятки переключения передач; 12 – датчик; 13 – ЭБУ; 14 – потенциометр; 15 – стравливающее отверстие; 16, 26 – обмотки электромагнитов; 17, 21 – каналы сервокамеры; 18 – корпус золотника; 19 – золотник; 20 – поворотный элемент; 22, 23 – каналы золотника; 24, 25 – соответственно воздушный и вакуумный клапаны; 27 – вакуум-ресивер; 28 – клапан; 29 – коллектор; 30 – трубопровод; МВх – контакты микровыключателя; ВП, ВС – электроконтакты; К – клемма ЭБУ
При установке рычага 11 переключения передач в нейтральное положение и отпущенной педали подачи топлива 8 расположенные в его рукоятке и под рычагом электроконтакты ВС и ВП разомкнуты. Поэтому обмотки электромагнитов 16 и 26 оказываются отключенными от источника электропитания. Вакуумный клапан 25 при этом закрыт, и полость 2 сервокамеры соединена не с вакуум-ресивером 27, а с атмосферой (через открытый воздушный клапан 24). Сцепление находится во включенном состоянии. Как только водитель при неподвижном автомобиле включает какую-либо передачу, на обмотки электромагнитов 16 и 26 через замкнувшиеся контакты выключателя ВП и замкнутую выходную цепь электронного блока управления (ЭБУ) 13 подается электропитание. В результате электромагниты срабатывают и воздушный клапан 24 отсоединяет полость 2 сервокамеры от атмосферы, а клапан 25 подключает ее к вакуум-ресиверу 27. Сцепление выключается (позиция II).
Чтобы автомобиль начал движение, водитель нажимает на педаль 8 подачи топлива. При этом контакты микровыключателя МВх размыкаются, и цепь питания обмотки электромагнита 26 размыкается. Поэтому клапан 25 закрывается, отсекая полость 2 сервокамеры от ресивера. Но поскольку обмотка электромагнита 16 остается под напряжением, воздушный клапан 24 оказывается также закрытым, и разрежение в полости 2 вакуумной камеры определяется только положением золотника 19. Дело в том, что корпус 18 золотника установлен по отношению к его поворотному элементу 20 таким образом, что при отпущенной педали 8 подачи топлива и расположении штока 4 вакуумной камеры в крайнем левом (по схеме) положении (полностью выключенное сцепление) каналы 22 и 23 золотника соединены между собой. Одновременно и полость 2 сервокамеры через каналы 17 и 21 соединяется с атмосферой, что приводит к постепенному уменьшению в ней разрежения и, как следствие, к перемещению штока 4 слева направо.
Движение штока будет продолжаться до тех пор, пока элемент 20, поворачиваемый этим штоком, не разобщит каналы 22 и 23. Как только это произойдет, шток 4 прекратит движение, поскольку связь полости 2 сервокамеры с атмосферой прерывается.
При дальнейшем перемещении педали 8 подачи топлива трос 9 поворачивает элемент 20, соединяя каналы 22 и 23. Это влечет за собой соединение полости 2 сервокамеры с атмосферой и дальнейшее перемещение штока в направлении включения сцепления. Перемещение прекратится, когда шток 4 опять установится в положение, соответствующее разобщению каналов 22 и 23. Очевидно, что чем на больший угол была открыта дроссельная заслонка, тем дальше в направлении включения сцепления должен перемещаться шток 4 — до положения, при котором произойдет разобщение каналов 22 и 23. Угол открытия дроссельной заслонки изменяется от минимального в позиции III на рис. до максимального при полностью открытом дросселе в позиции I.
После того как автомобиль разгонится до скорости срабатывания датчика 12, сигнал от этого датчика поступает на электронный блок 13. Последний отключает от «массы» свою клемму К, разрывая тем самым цепь питания обмотки электромагнита 16. В результате воздушный клапан 24 открывается, полость 2 сервокамеры соединяется с атмосферой независимо от того, в каком положении находятся элементы золотника. Сцепление блокируется. Чтобы оно при этом включалось плавно, диаметр стравливающего отверстия 15 выбран таким, чтобы скорость поступления воздуха через него не зависела от скорости открытия воздушного клапана.
Принудительное выключение сцепления в процессе переключения передач при всех частотах вращения коленчатого вала двигателя и скорости движения автомобиля обеспечивается замыканием контактов выключателя ВС, встроенного в рукоятку 10 переключателя передач. В этом случае включается электромагнит 26, благодаря чему полость 2 сервокамеры через открывшийся вакуумный клапан соединяется с вакуум-ресивером. Сцепление полностью выключается.
Система «Драйв-Матик» обеспечивает плавное увеличение крутящего момента, передаваемого сцеплением, только по мере увеличения угла открывания дроссельной заслонки. Если водитель уменьшает угол, то этот момент не уменьшается. Чтобы не произошло остановки двигателя или «рывков» автомобиля, водитель должен сначала полностью отпустить педаль подачи топлива (замкнуть контакты микровыключателя МВх и соединить тем самым полость 2 сервокамеры с ресивером), а затем перевести эту педаль в требуемое условиями движения положение.
Данная особенность с точки зрения уменьшения опасности работы сцепления с длительной пробуксовкой – явление положительное. Однако она усложняет маневрирование на автомобиле при низких скоростях движения, а также ухудшает возможности трогания автомобиля с места на больших подъемах.
Порошковое сцепление
На автомобилях малого класса отдельных производителей автомобилей может применяться порошковое сцепление.

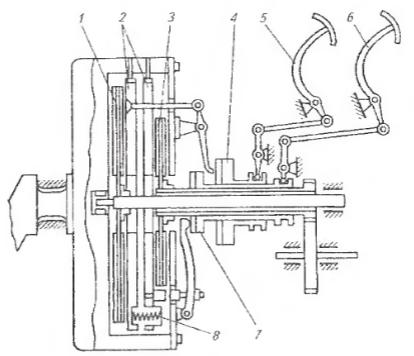
Рис. Электромагнитное порошковое сцепление:
А, Б, В – зазоры; 1 – маховик; 2 – неподвижный корпус; 3 – обмотка возбуждения; 4 – ведомый диск
Ведущим элементом сцепления является маховик 1 с закрепленными на нем магнитопроводами с обмотками возбуждения 3. Ведомый диск 4 закреплен на ведущем валу коробки передачи. Между магнитопроводами и ведомым диском имеется воздушный зазор А, в который вводится специальный фрикционный порошок, обладающий высокими магнитными свойствами. При отсутствии тока в обмотках возбуждения между ведущими и ведомыми элементами сцепления силовой связи нет – сцепление выключено. Если к обмоткам возбуждения подводится электрический ток, то за счет образования магнитного поля, частицы порошка выстраиваются по силовым линиям магнитного поля, и создается силовое взаимодействие между ведущими и ведомыми элементами сцепления. Силовая связь зависит от силы тока, поступающего в обмотку возбуждения. Основное достоинство такой конструкции заключается в том, что управление сцеплением можно перенести с педали сцепления на ручной, кнопочный вариант управления, что актуально для водителей с ограниченными физическими возможностями.
Сцепление на основе магнитореологической жидкости (MRF)
Специалисты фирмы Magna Powertrain создали сцепление на основе магнитореологической жидкости (MRF). Особые свойства магнитореологической жидкости уже используются в амортизаторах с перестраиваемыми характеристиками. MRF представляет собой взвесь сферических микрочастиц карбонильного железа размером 1…10 мкм в растворителе. В отсутствие магнитного поля частицы практически не ощущаются и жидкость ведет себя подобно воде. Однако при включении расположенного рядом соленоида, частицы выстраиваются в более или менее прочные цепочки и жидкость с малой вязкостью превращается в густой либо в очень густую либо в подобие твердого тела.
Если заполнить пространство между ведомыми и ведущими дисками магнитореологической жидкостью и создать в ней достаточно сильное магнитное поле, диски будут соединены между собой. Регулируя ток в управляющих соленоидах, можно обеспечить плавное включение, пробуксовку, причем без присущих традиционному сцеплению крутильных колебаний.
Вместо обычных дисков для сцепления предпочтительнее конструкция на основе вложенных друг в друга стаканов 1 и 2. Дело в том, что вал двигателя может вращаться с большой скоростью. С ростом частоты вращения коленчатого вала растет центробежная сила, увлекающая частицы железа к внешней части дисков, что ведет к увеличению передаваемого сцеплением крутящего момента вне зависимости от желания водителя, то есть положения педали, или команды электроники (в случае АКП). В цилиндрической конструкции это явление выражено намного слабее.

Рис. Принципиальная схема сцепления на основе магнитореологической жидкости:
1 – ведущие стаканы; 2 – ведомые стаканы; 3 – магнитореологическая жидкость
Более широкое распространение в трансмиссии легковых автомобилей нашли одно и многодисковые фрикционные сцепления, которые будут рассмотрены ниже.




Добавить комментарий