Рулевое управление с двумя управляемыми осями
Устойчивость и управляемость автомобиля при поворотах во многом зависит от направления следования задней оси по колее передней. Это необходимо для уменьшения угла поворота автомобиля и износа его шин. Применение управляемой задней оси позволяет уменьшать поперечные ускорения при повороте автомобиля, что повышает его устойчивость. Системы управления всеми четырьмя колесами значительно улучшают маневрирование автомобилем:
- Во-первых – повышается чувствительность автомобиля к повороту рулевого колеса. Ведь при тихой езде по городским улочкам лучше иметь «острое» рулевое управление, чтобы не вращать рулевое колесо на несколько оборотов при каждом маневре. На автостраде же «острые» рулевое управление может вызвать проблемы – автомобиль будет слишком резко реагировать даже на небольшие подруливания.
- Во вторых – улучшить маневренность автомобиля при парковке или развороте в стесненных городских условиях, то есть уменьшить радиус поворота.
- И в третьих – повысить курсовую устойчивость при резких маневрах на высокой скорости.
Поворот задних колес в ту же сторону, что и передних, позволяет сохранить направление и скорость движения центра масс автомобиля, но значительно увеличить мгновенный радиус поворота. При этом уменьшаются действующие на автомобиль боковые силы и, как следствие, повышается курсовая устойчивость.
При движении на малой скорости задние колеса поворачиваются в противофазе с передними, и мгновенный радиус поворота уменьшается, а при движении на большой скорости в быстром вираже или при перестроении из ряда в ряд на автостраде, задние колеса, наоборот, будут поворачиваться на небольшой угол в ту же сторону, что и передние. К примеру, автомобиль, совершая маневр на автостраде, будет словно не поворачивать, а переходить из ряда в ряд параллельно полосам разметки. Автомобиль при этом будет двигаться по дуге меньшей кривизны и большего радиуса. Момент, поворачивающий автомобиль вокруг вертикальной оси, будет меньше – стало быть, уменьшится и риск потери курсовой устойчивости и развития заноса задней оси.

Рис. Радиус поворота обычного автомобиля (МЦП – мгновенный центр поворота) и автомобиля со всеми управляемыми колесами (4WS)
В связи с эти некоторые производители вносят в конструкцию автомобиля управление задней осью. Одной из первых такую конструкцию механического управления задней осью представила фирм Мицубиси.

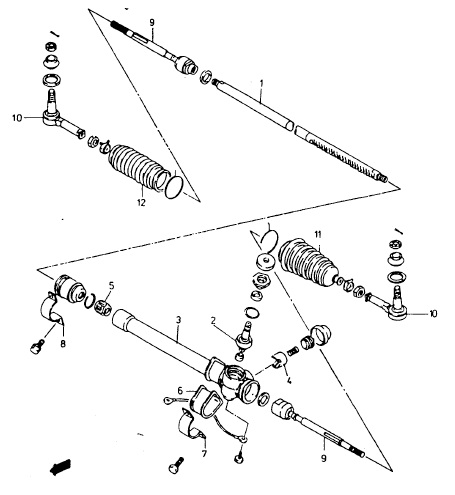
Рис. Механическое управление задней осью:
1 – масляный насос; 2 – ресивер; 3 – рулевой механизм с гидроусилителем; 4 – рулевое колесо; 5 – золотник; 6 – редукционный клапан; 7 – масляный насос задней оси; 8 – силовой цилиндр
В общую систему управления автомобилей входят рулевой механизм с гидроусилителем силовым цилиндром) управления передней осью 3, масляный насос 1, масляный насос управления задней осью 7, гидрораспределитель управления задней осью с золотником 5 и редукционным клапаном 6, силового цилиндра управления задней осью 8, рулевых тяг поворота передней и задней осью.
При повороте передних колес управляющее давление силового цилиндра передних колес передается в силовой цилиндр задних колес. При этом учитывается давление в системе, скорость поворота и уровень боковой нагрузки передней оси. Управляющее давление воздействует на золотник гидрораспределителя задней оси. В зависимости от воздействующего давления золотник передвигаясь открывает на определенную величину масляные каналы, по которым рабочая жидкость подается в силовой цилиндр управления задней осью. Поршень силового цилиндра, передвигаясь, воздействует на рулевые тяги задней оси, поворачивающие на необходимый угол заднюю ось.
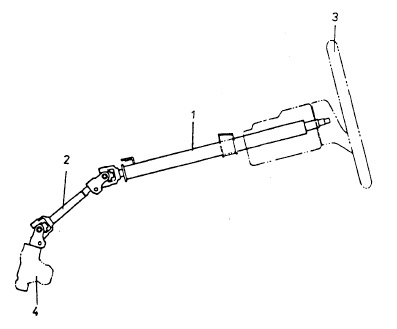
По мере развития электронных систем управления их стали применять и в управлении задней оси (4WS). Примером может служить электронно управляемая задняя ось автомобиля Тойота Аристо, которая в 1991 году сменила механическую, общий вид которой показан на первом рисунке, а схема исполнительного механизма на втором рисунке. Подобная система применяется также и в автомобилях БМВ.

Рис. Общий вид управляемой задней осью с электромеханическим исполнительным механизмом

Рис. Электромеханический исполнительный механизм поворота задней оси:
1 – ротор (пустотелый вал); 2 – статор; 3 – планетарная коробка передач; 4 – гайка шпинделя; 5 – сателлит; 6 – солнечная шестерня; 7 – шпиндель (винт); 8 – шлицевая часть вала шпинделя; 9 – предохранитель от прокручивания шпинделя; 10 – водило планетарной передачи
Задние колеса здесь поворачиваются с помощью специального рулевого механизма с электроприводом, встроенного в довольно сложную заднюю подвеску. А управляет им специальный электронный блок, который получает от нескольких датчиков информацию о скорости автомобиля, об угле поворота руля, передних и задних колес и т. д.
Исполнительный механизм состоит из электродвигателя (статора и ротора), планетарной передачи и вала шпинделя воздействующего на рулевые тяги задней оси. Управление электродвигателем осуществляется от электронного блока управления, воспринимающего сигналы от различных датчиков рулевого управления. В зависимости от величины и времени подачи напряжения на электродвигатель изменяется скорость и время вращения ротора электродвигателя. Для увеличения крутящего момента и толкающих сил шпинделя в исполнительном механизме применяется планетарная передача.
При подаче напряжения на электродвигатель пустотелый вал ротора 1 начинает вращаться. На валу ротора имеется солнечная шестерня 6, которая через сателлиты 5 и водило 10 планетарной передачи приводит во вращения связанную с ним гайку шпинделя 4. Вал шпинделя, установленный внутри пустотелого вала ротора через винт 7 начинает совершать возвратно-поступательные движения, воздействуя на рулевые тяги задней оси. Для исключения прокручивания вала шпинделя предусмотрен специальный предохранитель 10.
Работает система 4WS в двух режимах. На малой скорости задние колеса поворачиваются в сторону, противоположную передним, и при маневре той же кривизны рулевое колесо нужно будет вращать на меньший угол. Это повышает чувствительность рулевого управления и автомобиль становится более маневренным. К примеру, при развороте передние колеса будут вывернуты до упора влево, а задние – вправо на угол до восьми градусов. Радиус разворота при этом уменьшится на 15% по сравнению с обычным автомобилем и составит всего 4,7 метра.