Датчик давления топлива в аккумуляторе
Датчик давления топлива в аккумуляторе 9 служит для передачи сигнала...
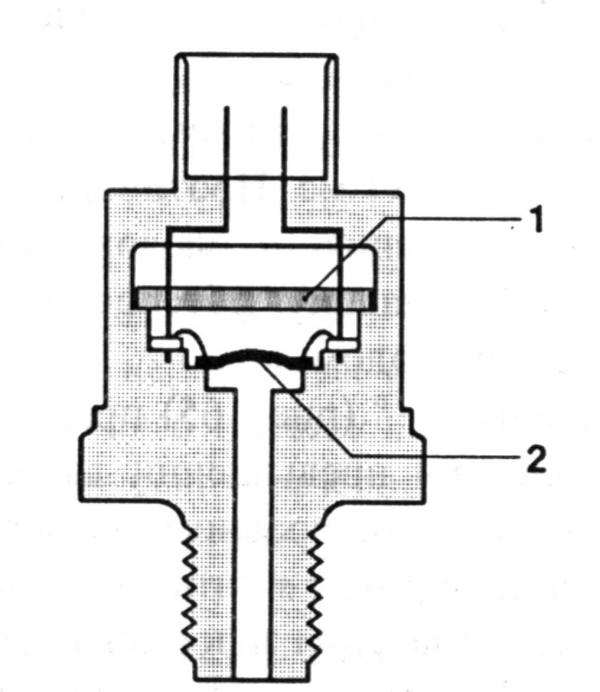
Датчик давления топлива в аккумуляторе 9 служит для передачи сигнала...

Датчик неровной дороги предназначен для измерения амплитуды колебаний кузова автомобиля....

Расходомеры воздуха и датчики, применяемые для систем впрыска бензиновых двигателей...
Кроме датчиков кислорода, системы контроля отработавших газов содержат датчики содержания...
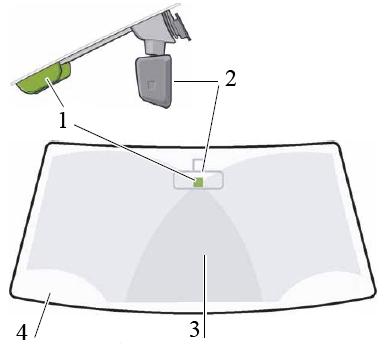
Датчик дождя и освещенности устанавливается на ветровом стекле, например, между...

Компания Bosch приостановила работы по созданию лидаров - технологии, которая...
Амперметр Амперметр служит для контроля за величиной разрядного и зарядного тока...

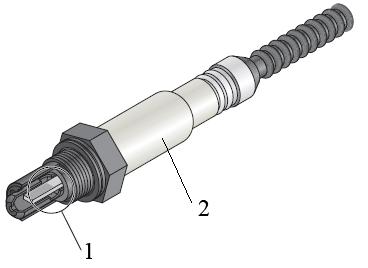
НАЗНАЧЕНИЕ Предоставляет в систему управления зажиганием или ЭБУ двигателем информацию о...
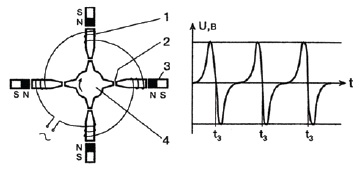
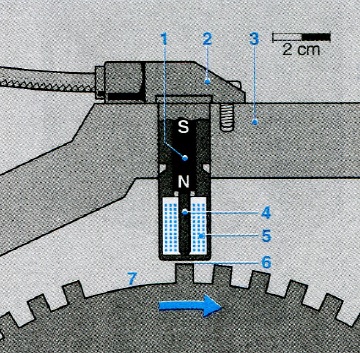
Датчик оборотов двигателя предоставляет в систему управления зажиганием или ЭБУ...

Датчик отключения бензонасоса предназначен для отключения бензонасоса (размыкание цепи питания)...
НАЗНАЧЕНИЕ Предоставляет в систему управления зажиганием или ЭБУ двигателем информацию об...

Применение Датчики управления приводом снимают показания числа оборотов вала в АТ-,...
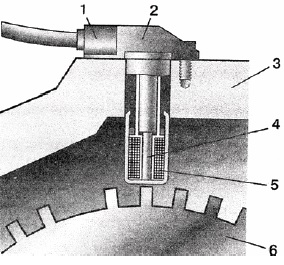
Применения Датчики частоты вращения двигателя используются в системах управления двигателем для: ...
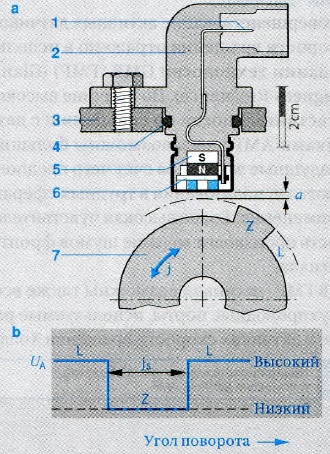
Применение Распределительный вал редуцирован по сравнению с коленчатым валом на 1:2....
Контроль отдельных систем и датчиков в D-OBD выполняется аналогично алгоритмам...
У турбонаддувных двигателей с регулируемой геометрией турбины особенно важно контролировать...
С 01.01.2004 г. легковые автомобили с дизельными двигателями также должны...
Слабым местом в электрической системе автомобилей является прокладка проводов и...
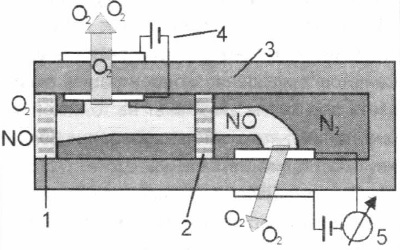
Рис. Принцип работы двухкамерного датчика: Барьер 1 Барьер 2 Твердый электролит Подача напряжения для...
Магнитостатические датчики измеряют магнитное поле постоянного тока. В отличие от...

Угловой датчик, разработанный фирмой «Неllа», не относится ни к одной...
Используя катушки, питание которых осуществляется за счет переменного тока с...
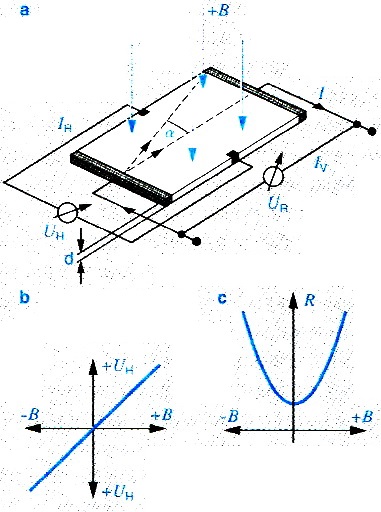
Эффект Холла, определяется прежде всего с помощью полупроводниковых пластин. Если...